Programming Active Cohesive Granular Matter with Mechanically Induced Phase Changes
Abstract
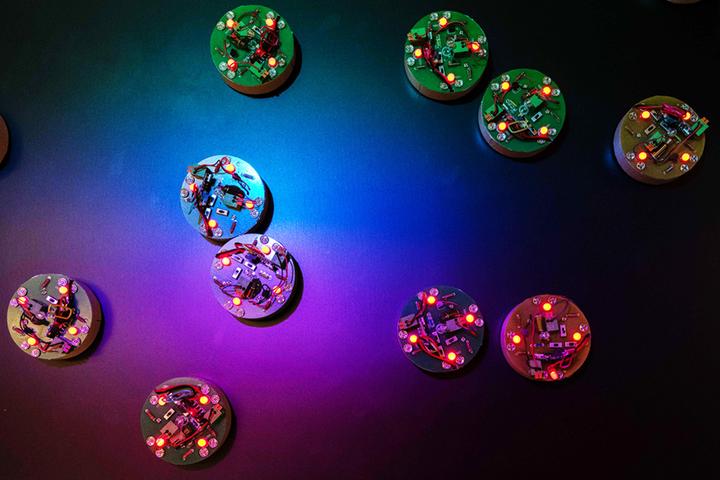
At the macroscale, controlling robotic swarms typically uses substantial memory, processing power, and coordination unavailable at the microscale, e.g., for colloidal robots, which could be useful for fighting disease, fabricating intelligent textiles, and designing nanocomputers. To develop principles that can leverage physical interactions and thus be used across scales, we take a two-pronged approach: a theoretical abstraction of self-organizing particle systems and an experimental robot system of active cohesive granular matter that intentionally lacks digital electronic computation and communication, using minimal (or no) sensing and control. As predicted by theory, as interparticle attraction increases, the collective transitions from dispersed to a compact phase. When aggregated, the collective can transport non-robot “impurities,” thus performing an emergent task driven by the physics underlying the transition. These results reveal a fruitful interplay between algorithm design and active matter robophysics that can result in principles for programming collectives without the need for complex algorithms or capabilities.
Related Press
- Simple Robots, Smart Algorithms: Meet the BOBbots. Dana Randall. Georgia Tech News Center, April 2021. (Also featured in EurekaAlert!).
- Greater Than the Sum of Its Parts. Gary Werner. ASU FullCircle, April 2021. (Also featured in ASU News).
Shengkai Li
PhD Student, Physics
Bahnisikha Dutta
PhD, Electrical Engineering
Sarah Cannon
Assistant Professor of Mathematics
Joshua J. Daymude
Assistant Professor, SCAI & CBSS
I am a Christian and assistant professor in computer science studying collective emergent behavior and programmable matter through the lens of distributed computing, stochastic processes, and bio-inspired algorithms. I also love gaming and playing music.